

Evaluation of the Biosleeve Gesture Control Interface for Telerobotics in Microgravity
PI: Christopher Assad, Jaakko Karras (Co-I), NASA/Jet Propulsion Laboratory
PI: Christopher Assad, Jaakko Karras (Co-I), NASA/Jet Propulsion Laboratory
- TA04 Robotics, Tele-Robotics and Autonomous Systems
- TA07 Human Exploration Destination Systems
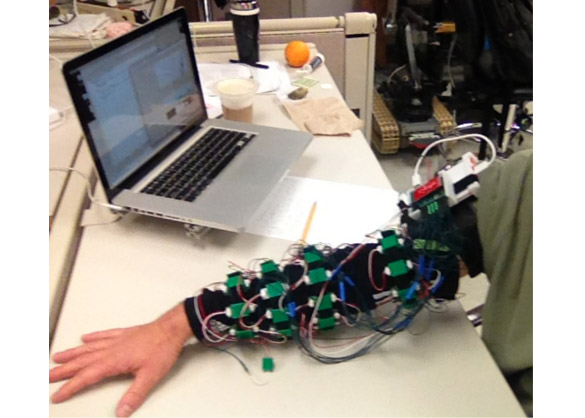
The current prototype has successfully achieved >95% accuracy in recognition of 20 static hand gestures and 10 dynamic arm gestures in ground testing. However, both capabilities are affected by the presence of gravity: the patterns of muscle activity change with respect to pose-dependent loading of the arm, and the gravity vector has been used with the magnetic field vector to predict arm pose. Because the near-term planned operational environment is on the International Space Station (ISS), we need to test the gesture recognition performance in the absence of gravity. The parabolic flight aircraft will allow testing in a microgravity environment, which will provide critical data on the performance of the interface, as well as give the team invaluable operational experience that may influence the design, development, and test program for the interface as it advances toward multiple flight opportunities.
Key objectives for the reduced gravity flight tests are:
1. Evaluate effects of the microgravity environment on gesture recognition performance, compared to performance in ground tests, after training both on the ground and during flight.
2. Demonstrate BioSleeve interface utility in the microgravity environment by performing a gesture control/manipulation task.
These microgravity tests should mature the BioSleeve technology from TRL 4 to TRL 5 or 6.
This work is significant because NASA and commercial space companies could benefit from BioSleeve gesture control technology for human-robot interactions in multiple applications, such as: natural hand gestures to direct surface rovers by an astronaut on EVA; intuitive telerobotic control for remote manipulation and for high degree-of-freedom robots such as Robonaut and Canadarm2 on ISS; and force control for power-assisted EVA gloves or exoskeletons.
Technology Details
-
Selection DateREDDI-F1-15 (Nov 2015)
-
Program StatusCompleted
- 1 Parabolic
Development Team
-
PIChristopher Assad
-
PI Organization
-
Co-IJaakko Karras
-
Co-I Organization
-
SponsorNASA/JPL
-
More Information